Quelques mots clés dans la barre de recherche et les résultats parlent d’eux-mêmes, la localisation indoor (littéralement "en intérieur") connaît un succès sans précédent. Là où les signaux GPS peinent à se propager, de nouvelles technologies viennent prendre le relais.
Atteignant parfois des précisions centimétriques en environnement complexe, ces systèmes de positionnement révèlent un potentiel d’utilisation certain.
Revenons dans ce premier article sur les principes et enjeux de cette pratique en plein développement.
De l’avènement de la localisation indoor
Que ce soit pour déterminer l’emplacement d’un service et/ou d'un équipement ou bien se repérer soi-même dans l’environnement, les besoins en terme de géolocalisation sont de plus en plus marqués. Toujours plus spécifiques, les exigences et les technologies associées doivent évoluer régulièrement afin de répondre à de nouvelles contraintes de précision et de disponibilité.
Si la technologie GPS s’impose aujourd’hui en outdoor, offrant à grande échelle une précision de l’ordre de quelques mètres, le standard peine à fournir des résultats concluants en environnement fermé. En cause, des signaux satellites bridés en précision ou une fiabilité jugée trop faible au regard des utilisations souhaitées.
Ainsi, avec le déploiement omniprésent des réseaux sans fil, de nouveaux systèmes de positionnement indoor voient le jour. Les services fournis couvrent aussi bien des besoins de navigation que de suivi ou encore de surveillance.
Et si les acteurs du marché tendent à se multiplier, il en est de même pour les applications.
- Certains systèmes opèrent en milieu hospitalier, musées ou parkings souterrains dans une optique de guidage ou suivi temps réel. De même en logistique, l’optimisation des déplacements constitue un avantage stratégique indéniable afin de réduire le coût d’acheminement des marchandises.
- Dans les commerces, cette localisation fournit des analyses comportementales sur le parcours des clients. Identifier la position d’un utilisateur permet de créer de l’interactivité en fonction du lieu où il se trouve.
- Les systèmes s’adaptent également à des contextes de surveillance. Les technologies peuvent être mises à profit afin de suivre des personnes sensibles telles que des enfants en bas âge ou des personnes âgées (par exemple).
- De telles pratiques profitent enfin au domaine de l’IoT. Les systèmes de positionnement indoor permettent de localiser toute entité munie d’un tag ou encore de repérer des objets les uns par rapport aux autres.
Bien que certains de ces enjeux soient similaires à ceux de la localisation outdoor, les technologies utilisées n’en demeurent pas moins radicalement différentes.
Au sein d’espaces cloisonnés, de nouvelles contraintes apparaissent. La propagation des signaux en ligne de vue directe n’est plus garantie, les technologies doivent également s’accommoder des potentiels phénomènes de multi-trajets.
La localisation indoor soulève donc de nouveaux défis de conception et d'installation.
Les systèmes de positionnement, désormais déployés en environnement dynamique, doivent allier robustesse et fiabilité tout en répondant à des exigences de précision, de temps critique, d’efficacité énergétique et de coûts de déploiement.
Quelles technologies ?
Les technologies à l’œuvre au sein de tels systèmes peuvent se répartir en deux catégories :
- D’une part, celles fonctionnant de manière autonome sans interaction quelconque entre l’usager et les équipements externes.
- D’autre part celles nécessitant le déploiement d’une infrastructure en amont de la localisation (capteurs ou antennes, répartis dans la pièce à des positions connues).
Les technologies autonomes (sans infrastructure)
Capteurs inertiels et dead reckoning
Ces premiers systèmes de positionnement s’appuient sur une méthode dite de "dead reckoning", celle-ci consistant à déduire la position actuelle à partir de la dernière position connue.
L’utilisateur a ainsi recours à des capteurs inertiels (accéléromètres, gyroscopes, etc.) parfois utilisés conjointement avec une boussole ou un podomètre. Ces différents dispositifs permettent de quantifier les déplacements dans l’espace. En pratique l'utilisateur dispose d’un smartphone ou d’une carte embarquée intégrant la technologie inertielle. Le plan du bâtiment étant disponible, il est nécessaire de renseigner une position d’origine dans l’application de positionnement (connaissance de points de repères visuels).
Les données d’accélération récoltées pendant la phase de mouvement permettent ensuite de déterminer de nouvelles positions. Le positionnement est relatif, la position à l’instant T-1 permettant de déterminer celle à l’instant T.
La carte ou le téléphone support peuvent par ailleurs communiquer avec un serveur. L’opération permet ainsi de centraliser les données tout en réduisant les coûts calculatoires au niveau du terminal embarqué.
Atouts et faiblesses :
De tels systèmes présentent l’avantage d’être totalement autonomes une fois le plan du bâtiment acquis. Toutefois la précision atteinte reste limitée de par les erreurs progressivement cumulées.
En pratique les capteurs inertiels sont usuellement utilisés en support d’autres technologies, selon un principe de fusion des données.
Étude des champs magnétiques
Que ce soit au niveau d’un couloir, d’une porte ou encore d’une cage d’ascenseur, les structures métalliques présentes dans un bâtiment engendrent une perturbation dans le champ magnétique terrestre qui leur sont propre. L’utilisation d’un capteur à effet Hall afin d’enregistrer ces variations permet alors de déterminer une position.
Cette méthode de positionnement, bien qu’indépendante de tout périphérique externe nécessite une première phase de calibration. Aussi l’utilisateur doit dans un premier temps disposer d’informations spécifiques au milieu étudié.
Deux approches sont alors possibles :
- L’utilisation des valeurs du champ pour chaque position, mesurées sur différents axes
- La reconnaissance de patterns représentatifs d’un élément
La première démarche s’appuie sur un principe dit de "Fingerprinting". Dans une première phase de mapping l’usager utilise le capteur à effet Hall intégré à son téléphone afin de réaliser un ensemble de mesures. A différentes positions de l’espace il enregistre donc les valeurs du champ magnétique selon chacun des 3 axes du repère (O, x, y, z).
[caption id="attachment_5113" align="aligncenter" width="450"] Figure 1 : Repère d'étude lié à l'appareil embarqué[/caption]
Figure 1 : Repère d'étude lié à l'appareil embarqué[/caption]
Par la suite, lors de la phase de libre déplacement, le téléphone est en mesure de comparer les valeurs actuelles avec celles de la base de données précédemment constituée. Il repère alors l’usager à la position correspondante.
Néanmoins, certaines conditions doivent être réunies afin que les mesures acquises restent exploitables. Notamment, malgré les potentiels changements d’orientation du téléphone, il est primordial que le repère d’étude reste fixe. Ce procédé est réalisable par exploitation des données gyroscopiques selon les axes de roulis, tangage et lacet. Une fois ces variations connues il est possible d’appliquer une matrice de rotation dans l’espace afin de conserver les différents axes selon une orientation stable.
Toutefois, le processus de Fingerprinting seul permet rarement d’assurer une bonne fiabilité de positionnement. En cause, les valeurs de champ pouvant être proches ou identiques, et ce, pour plusieurs positions de l’espace.
Afin de contourner ce défaut, certains systèmes décident d'ajouter une dimension à l’équation : celle du temps, et donc de la "vitesse". Ainsi ce ne sont plus trois valeurs qui sont accessibles mais trois valeurs et leurs dérivées.
Le principe consiste alors à enregistrer les perturbations magnétiques rencontrées lors du déplacement (cf Figure 2).
[caption id="attachment_5061" align="aligncenter" width="550"]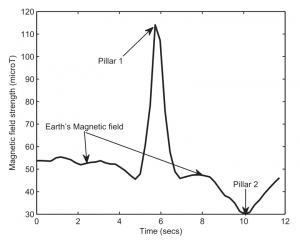 Figure 2 : Exemple d’anomalies magnétiques engendrées par la présence de piliers[/caption]
Figure 2 : Exemple d’anomalies magnétiques engendrées par la présence de piliers[/caption]
Par la suite, un algorithme de reconnaissance de patterns permet d’indiquer la position de l’usager. Afin de réaliser cette correspondance, il est néanmoins nécessaire que celui-ci soit en mouvement.
Atouts et faiblesses :
Bien que moins connu du grand public, le positionnement par champ magnétique apparaît comme un procédé prometteur et disponible à faible coût. Les systèmes offrent une bonne précision (couramment inférieure au mètre), le tout, sans aucune exigence d’infrastructure. Néanmoins l’usage de tels principes se limite à des configurations bien particulières. En effet, l’introduction d’une composante de mouvement suggère que l’ensemble des déplacements de l’usager soient prévisibles, et donc que l’environnement présente des parcours déjà définis (exemple d’un magasin avec différents rayons ou de couloirs étroits dans un bâtiment).
De fait, la liberté de mouvement doit être limitée, sous peine d’introduire une complexité excessive. Par ailleurs le milieu doit exhiber une densité de mobilier suffisante, de manière à provoquer des perturbations locales, essentielles à l’algorithme de positionnement.
Les technologies s’appuyant sur une infrastructure
Les techniques d’imagerie
Cette première méthode consiste à équiper le lieu dans lequel la localisation est souhaitée avec un ensemble de capteurs (caméras, LIDAR) qui restent à une position fixe et connue. Ces capteurs repéreront l'objet à surveiller et en déduiront la position.
De tels procédés reposent sur un même concept : analyser l’environnement afin d’en extraire des anomalies. Les supports sont divers, allant de la caméra simple ou dotée de fonctionnalités infrarouges, aux systèmes de traitement laser comme les lidars.
En ce qui concerne les caméras, leur usage est fréquent dans des cadres de surveillance ou de détection. Grâce aux techniques de reconnaissance de contours, un objet est ainsi repérable sur une image tant qu’il reste dans le champ de vision.
Si ces caméras sont souvent fixes, elles peuvent également être directement embarquées sur un équipement mobile, solidaire de la personne à localiser (procédé notamment utilisé en robotique). Similairement, le positionnement s’appuie sur un traitement de l’image, l’opération permet alors une estimation des distances et un repérage fidèle dans l’espace.
Bien que plus coûteuse, l’emploi de lidars est également une alternative efficace permettant de reconstituer l’environnement. Ici le balayage est réalisé par un faisceau laser, le système est alors en mesure de notifier des mouvements dans la pièce tout en réalisant une cartographie 3D. C'est ce principe qui est notamment utilisé dans le contexte automobile pour la fonctionnalité de régulateur de vitesse adaptatif (ACC - Adaptative Cruise Control).
Atouts et faiblesses :
Les systèmes d’imagerie atteignent souvent une très bonne précision en milieu fermé, de surcroît ils ne nécessitent aucun dispositif rattaché à l’utilisateur, ce qui constitue un avantage certain (le système est dit "device free").
Cependant leurs limites apparaissent en ligne de vue non directe (NLOS). Enfin, lorsque plusieurs personnes sont présentes, des difficultés d’identification surviennent. Des solutions existent, mais cela requiert des capacités de calculs élevées, venant alourdir la facture des équipements à déployer.
L’exploitation des ondes radio
Les ondes radio-fréquence disposent de caractéristiques attrayantes d’un point de vue localisation.
De fait, leur omniprésence au quotidien ainsi que leur capacité de pénétration des cloisons sont autant d’atouts justifiant leur utilisation. Aujourd’hui elles sont à la base de la majorité des systèmes de positionnement.
Entre Ultrasons, Wi-Fi, Bluetooth Low Energy, RFID ou encore UWB, les standards sont multiples et s’adaptent à de nombreux cas d’utilisation. L’architecture usuelle se compose d’un tag mobile, rattaché à l’usager ou à l'équipement à localiser, ainsi que d’un réseau d’antennes, déployées dans l’environnement (cf Figure 3)
[caption id="attachment_5065" align="aligncenter" width="550"]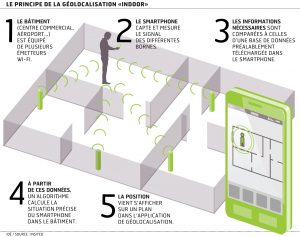 Figure 3 : Exemple d’utilisation des signaux Wi-Fi à des fins de localisation
Figure 3 : Exemple d’utilisation des signaux Wi-Fi à des fins de localisation
Principe de Fingerprinting appliqué aux ondes radio
Sources : LesEchos.fr[/caption]
Deux cas de figure peuvent alors se présenter :
- Soit le tag émet et les antennes sont à l’écoute
- Soit chaque antenne émet à destination du tag, chargé de traiter l’information
[caption id="attachment_5057" align="aligncenter" width="550"] Figure 4 : Configurations possibles dans les systèmes
Figure 4 : Configurations possibles dans les systèmes
de positionnement par ondes radio[/caption]
Chacune de ces configurations propose divers avantages :
La première permet la réduction d’éléments "actifs" au sein du système. En effet, seul le tag est chargé d’émettre à destination des antennes environnantes, ce qui facilite notamment les aspects de synchronisation. Après réception du signal celles-ci communiquent avec un serveur en charge d’effectuer le traitement algorithmique.
Grâce à cette approche, les ressources de calcul requises au niveau du tag sont réduites, la position de l’utilisateur est par ailleurs rendue accessible au plus grand nombre par l’accès au serveur.
La seconde configuration concentre l’ensemble du traitement au niveau de l'équipement à localiser, cela permet une mise à jour immédiate de la position sans avoir recours à un service externe.
La disponibilité d’une connexion réseau n’est plus nécessaire.
En pratique le choix de la solution est à la charge du concepteur, selon l’utilisation souhaitée et la technologie support. En somme, la figure suivante synthétise la classification du chapitre :
[caption id="attachment_5123" align="aligncenter" width="600"] Figure 5 : Classification des technologies de positionnement indoor selon l’architecture à déployer[/caption]
Figure 5 : Classification des technologies de positionnement indoor selon l’architecture à déployer[/caption]
Cette premiere partie amorce la présentation des divers procédés de localisation en milieu fermé. Si les ondes radio-fréquence dirigent aujourd’hui le marché, certaines architectures apparaissent plus propices à d’autres contextes d’utilisation (systèmes device-free dans un contexte de surveillance, infrastructure-based lorsque le milieu est connu)
Les principes de positionnement par ondes radio restent encore énigmatiques et fascinants.
Ils seront le sujet d’un second article de géolocalisation, à paraître sous peu.
Et le VLC ?